



楼宇机器人乘梯
多(duō)奥方案书
关键字:多(duō)奥机器人電(diàn)梯联动系统
概述
長(cháng)期以来,大部分(fēn)机器人仅仅实现平层空间移动,尤其是乘坐(zuò)電(diàn)梯这个难题。然而,在目前的居住和工作的环境中,楼层越来越高,对于机器人的服務(wù)也变得重要而迫切,机器人如何高效低成本实现"乘梯上楼"?成為(wèi)摆在配送机器人眼前的首要问题。
应"人工智能(néng)"服務(wù)机器人的发展趋势,在垂直電(diàn)梯管理(lǐ)方面,也陆续推出了一系列针对机器人乘梯通行的解决方案。多(duō)奥采用(yòng)先进的物(wù)联网和云计算技术,通过WIFI、4G等无線(xiàn)方式实现对接,实现机器人自主乘梯。
机器人通过无線(xiàn)信号的传输,将乘梯指令直接下达到電(diàn)梯控制系统,電(diàn)梯状态监测实时识别楼层,实现机器人自主乘梯,直达目的楼层。该方案解决了机器人改变了以往只能(néng)在平层移动的限制,大大拓展机器人的应用(yòng)范围和领域。
机器人乘梯系统框图
系统框图说明
云系统服務(wù)器:接收机器人召梯及点亮楼层信息指令,并向電(diàn)梯控制器下发指令
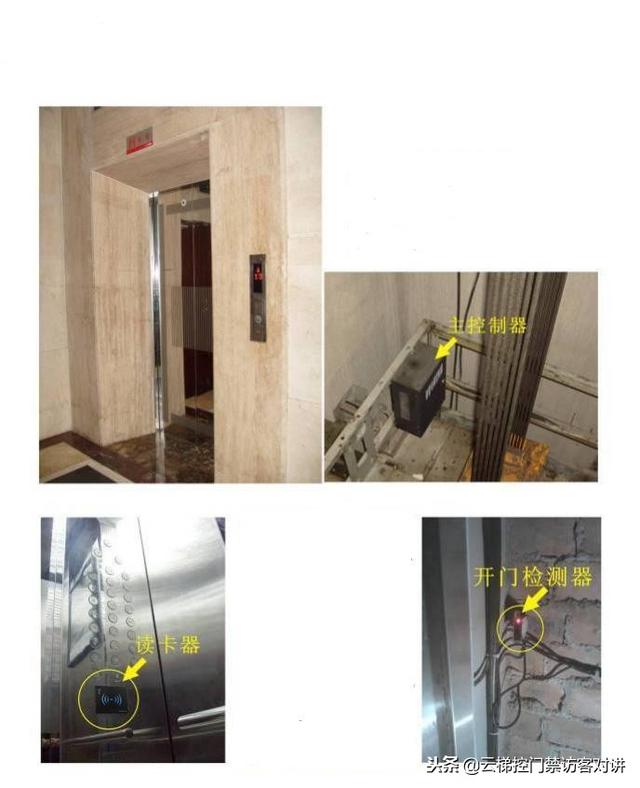
電(diàn)梯控制器(外呼):接收到系统服務(wù)器指令,将電(diàn)梯呼至机器人所在楼层;
電(diàn)梯控制器(内呼):接收到系统服務(wù)器指令,点亮机器人目标楼层按键;
電(diàn)梯读头:人员乘梯;单层权限刷卡直达,无需按键,多(duō)层权限刷卡后选择按键 ;
485通讯协议板:控制器与電(diàn)梯楼层信号采集模块之间通信协议;
红外检测模块:检测机器人是否进入電(diàn)梯;
電(diàn)梯楼层信号采集模块:检测電(diàn)梯运行状态,及所在楼层位置;
乘梯流程图
流程说明
机器人到达電(diàn)梯厅后向梯控系统服務(wù)器发送指令,将電(diàn)梯召至所在楼层;
梯控系统服務(wù)器向電(diàn)梯控制器发送指令,直接点亮電(diàn)梯上行或下行按键;
電(diàn)梯到达机器人所在楼层后,楼层检测模块向梯控系统服務(wù)器发送電(diàn)梯状态信息,梯控系统服務(wù)器告知机器人进入電(diàn)梯;
机器人进入電(diàn)梯后向梯控系统服務(wù)器发送目的楼层指令,梯控系统服務(wù)器告知電(diàn)梯控制器,直接点亮目的楼层按键。
電(diàn)梯到达目的楼层后,楼层检测模块向系统服務(wù)器发送電(diàn)梯状态信息,梯控系统服務(wù)器告知机器人可(kě)以离开電(diàn)梯。




區(qū)電(diàn)梯刷卡你怎么看?")
业私自加装電(diàn)梯刷卡器,维保公司却被罚款一")
奥科(kē)技智能(néng)IC卡電(diàn)梯控制系统技术参数说明")